几何学-黎曼几何与罗氏几何
第 6 章 非欧几何学6.1 基本概念与性质6.1.1 三种第五公理6.1.2 内角和与面积6.1.3 弯曲面的几何学6.1.4 内蕴几何与外在几何6.1.5 高斯曲率6.1.6 常曲率曲面6.1.7 与莫比乌斯变换6.2 球面几何6.2.1 球面运动6.2.2 共形映射6.2.3 空间旋转与莫比乌斯变换1 解析函数2 反射变换3 旋转变换4 运动的一般形式5 绕单位向量旋转6 应用与特例6.2.4 空间旋转与四元数1 四元数的概念2 四元数的起源3 基本代数性质4 两种矩阵同构5 共轭的性质6 长度的性质7 单位四元数8 旋转公式矩阵证法9 旋转公式反射证法10 旋转公式向量证法11 旋转公式几何证法12 四元数的逆与伴随13 四元数的其它运算6.3 双曲几何6.3.1 曳物线和伪球面6.3.2 伪球面上的共形映射6.3.3 贝尔特拉米的双曲平面6.3.4 双曲直线和反射6.3.5 鲍耶-罗巴切夫斯基公式6.3.7 保向运动的三种类型第 7 章 环绕数与拓扑学7.1 环绕数7.2 霍普夫映射定理7.3 多项式与幅角原理
第 6 章 非欧几何学
6.1 基本概念与性质
6.1.1 三种第五公理
平行公理: 过直线
球面公理: 没有任何一条过
双曲公理: 至少有两条过
6.1.2 内角和与面积
概念
记角盈
手写体
正体
分类
当
当
当
性质
若
结论
在非欧几何中, 内角和完全由三角形的面积决定.
非欧几何中没有相似三角形, 有绝对的长度单位.
6.1.3 弯曲面的几何学
测地线: 两点之间的最短路径.
于是线段, 距离, 圆, 三角形等可依此定义.
线段上任意两点所连线段属于原线段.
6.1.4 内蕴几何与外在几何
6.1.5 高斯曲率
记号约定: 设曲面在点
主曲率:
主曲率产生在两个相互垂直的方向上.
高斯曲率:
高斯曲率是内蕴的 (高斯绝妙定理), 因此又称内蕴曲率或全曲率.
若
根据

积分计算角盈:
6.1.6 常曲率曲面
例子
常正曲率: 球面等.
常负曲率: 伪球等.
性质:
单位长度
欧氏几何: 无绝对的单位长度.
球面几何:
双曲几何:
6.1.7 与莫比乌斯变换
球面几何中的运动
将黎曼球面映为
保向运动即绕球心的旋转.
形如
双曲几何中的运动
伪球
单位伪球体积是单位球的一半.
将伪球面映为
形如
6.2 球面几何
6.2.1 球面运动
分类
反射
旋转
复合
反射:
旋转:


结论
恰有一条直线
恰有一个保向运动
球面上每个保向运动都是一个旋转, 每个反向运动都是一个旋转和一个反射的复合.
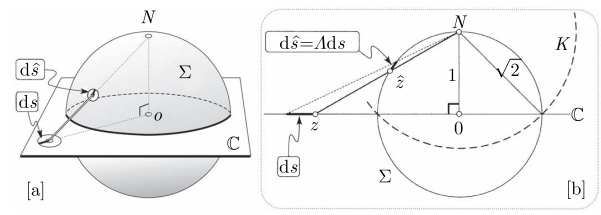
6.2.2 共形映射
从
黎曼球面
法一: 由距离公式
法二: 由相似知
6.2.3 空间旋转与莫比乌斯变换
1 解析函数
若解析函数
对于
2 反射变换
黎曼球面上关于直线
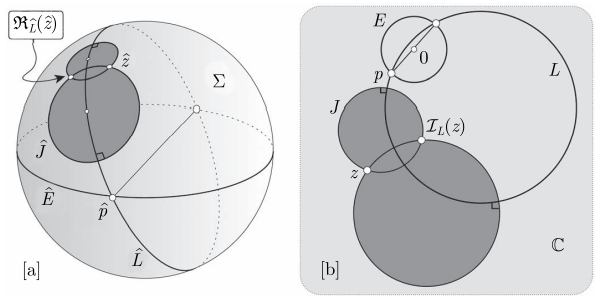
3 旋转变换
推导步骤
考虑
令
于是
总结
为了建立空间旋转与莫比乌斯变换的联系并应用, 我们的思路是:
⭐️ 于是可以得到
4 运动的一般形式
因此保向运动形如
注意到
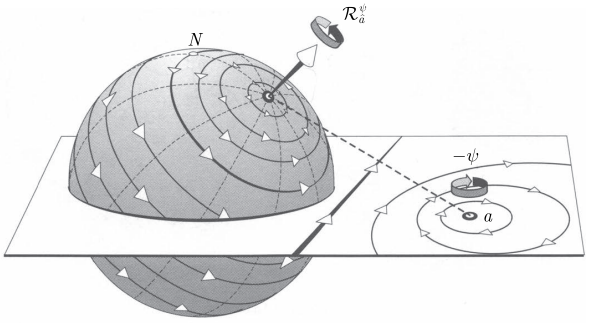
5 绕单位向量旋转
将上述旋转改写为绕单位向量旋转的形式.
记单位向量为
⭐️ 代入
该矩阵也是规范化的.
6 应用与特例
欲求解旋转的复合, 只需将旋转表示为复平面上的莫比乌斯变换, 求其复合后再转为旋转的形式.
上述矩阵本质上代表莫比乌斯变换, 而与熟知的实平面上旋转的矩阵形式不同. 如下, 左式为莫比乌斯变换的形式在
特殊的, 二元旋转的莫比乌斯变换为
6.2.4 空间旋转与四元数
1 四元数的概念
定义
群定义:
备注
这里使用空心字母表示四元数元素, 而非集合, 以区分于标量和向量.
这里四元数单位使用粗斜体, 表明它是 (四维实) 向量或 (二阶复) 矩阵.
有的资料上使用正体表示四元数单位, 表明它是标量常数; 这里不建议如此表示.
概念
数量部分:
向量部分:
纯四元数:
2 四元数的起源
首先澄清一点, 以下内容不一定是四元数真正的起源, 只是我根据已学知识推断出的一条比较合理的路.
从历史上来说, 我们知道复数的加法与乘法即复平面中的平移与旋转, 于是希望将其推广到三维空间, 并且存在某种运算可以对应空间旋转.
在
首先我们看到,
于是由上式可得
比较系数可得
这个反证法的思路与
自然的想法是令
旋转运动是可逆的, 因此我们希望四元数除零元外都可逆. 双复数不能作为我们理想的 "四元数", 因为双复数有零因子, 从而双复数的乘法未必可逆. 例如
似乎又陷入了窘境, 而且这样构造出来的双复数在运算上不具有轮换对称性, 并不美观. 不过回过头来, 我们希望的是通过三元或四元的 "超复数" 来研究三维的空间旋转, 空间旋转又具有怎样的性质呢? 我们惊讶地发现, 空间旋转并不满足交换律! 随便拿起一支笔或一颗魔方, 便可以验证这一点.
如果让四元数也不满足交换律呢? 实数是满足交换律的, 因此我们令
进一步我们还可以得到这种定义的四元数的诸多良好性质, 其中就包括非零元必有逆, 并且可以利用四元数方便地求解空间旋转的复合和效果. 这些就是接下来要推导的了. 即使抛开实际应用, 四元数作为纯数学, 内容也是丰富而有趣的.
我们称呼这种超复数为四元数, 但是定义似乎与之前的
以上我们探索了三种形式的超复数, 作为复数的 "扩展", 它们的定义分别是:
形式上看, 只剩下一个有待研究:
这种超复数称为分裂四元数或反四元数, 与双复数一样, 它也有非零元无逆, 如
最后, 我们之后使用的四元数单位的字体与前文不同, 不再是正体. 四元数单位之所以要使用大写的粗斜体, 是为了与复数单位区分. 由复数推广至四元数是自然的, 但是之后在研究四元数时, 常将其同构映射为复矩阵, 此时若不用粗斜体, 则容易混淆; 而小写的粗斜体常用于表示空间向量, 因此表示为
3 基本代数性质
性质
乘法
备注
将四元数集合视为
将纯四元数视为三维空间向量, 点积与叉积都是通常意义下的.
四元数无乘法交换律, 不能成域, 而只能构成环, 称为哈密顿四元数除环
4 两种矩阵同构
注:
二阶复矩阵
四阶实矩阵
其中四元数单位被映射为
以下将
想要通过计算机求解四元数运算, 可以利用矩阵形式.
5 共轭的性质
共轭
证明
(1) 式为矩阵共轭定义, (2) 式为向量共轭定义, 由矩阵表示可知二者等价.
6 长度的性质
长度
证明
7 单位四元数
单位四元数 (
当且仅当
证明
第四点解方程即得 (有两解).
8 旋转公式矩阵证法
旋转的矩阵 (可求复合) ⭐️
绕
记
旋转的效果 (可求象) ⭐️
一般的,
设
在上式中令
伸缩旋转
由旋转的象的公式得, 伸缩旋转的效果为:
9 旋转公式反射证法
若
正交的充要条件:
若
则上述方程化为
令
⭐️ 考虑变换
若由
其中
证明
由于是纯四元数,
当
不动点可用正交的等价条件证明, 这里继续使用向量法:
当
若
10 旋转公式向量证法
将
取
记
注意到
于是有
从而得到
11 旋转公式几何证法
12 四元数的逆与伴随
定义:
计算:
旋转:
共轭转置:
模长:
交换:
证明
13 四元数的其它运算
点积 (内积)
叉积 (矢积, 向量积)
外积
偶积
纯量部 (标量部)
向量部
模
角度的度量
符号数:
另一表示:
幅角:
证明
点积
叉积
外积
偶积: 由叉积证明过程即得.
纯量部与向量部: 由定义代入即得.
模: 即长度, 这里仅作总结, 结论均已证过.
符号数:
6.3 双曲几何
6.3.1 曳物线和伪球面
曳物线
令

伪球面
半径为
伪球面具有常值负曲率.
证明: 令
于是有
从而得到

6.3.2 伪球面上的共形映射
恒取伪球面的半径为
取坐标系为
如右图映至复平面,
为保证共形,

6.3.3 贝尔特拉米的双曲平面
双曲平面的映射
庞加莱上半平面
理想点 (无穷远点):
天际线 (无穷远圆):
庞加莱圆盘
克莱因圆盘
6.3.4 双曲直线和反射
定义
h 直线表示双曲直线 (测地线).
h 圆周:
距离
h 直线的分类
垂直于天际线的半直线.
垂直于天际线的半圆周.

对正交于天际线的半圆周的反演是双曲平面上的反向运动.
即证由
由此利用反演可证 h 直线的分类结果, 并因此可指出上述反向运动即对 h 直线
双曲平面上两点的距离:

平行线的分类
渐近线
超平行


6.3.5 鲍耶-罗巴切夫斯基公式
平行角

6.3.7 保向运动的三种类型
保向运动可表示为
每一个保向运动都可由一个非斜驶型的莫比乌斯变换表示, 并可表示为
若这两条 h 直线相交, 则
若这两条 h 直线是渐进的, 则
若这两条 h 直线是超平行的, 则
以
第 7 章 环绕数与拓扑学
7.1 环绕数
环绕数:
简单环路: 不自交的环路.
穿越法则: 记环路为
7.2 霍普夫映射定理
环路
7.3 多项式与幅角原理
若一个简单环路
若